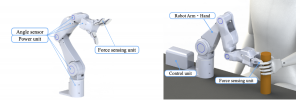
Research Cybernic InterfaceResearch 片麻痺者の腕となって日常生活を支援するサイバニックロボットアーム 2019年4月19日 本研究では,片麻痺者の失われた上肢機能を代替可能なロボットアームを研究開発し,片麻痺者が上肢作業に抱える問題を解決することを目的としています.健常な手・腕の生体情報の活用や知能化・自動化によりロボットアームをサイバニック化することで,あたかも使用者の腕であるかのように人の意思に基づいて機能するサイバニックロボットアーム...
Research Cybernic InterfaceResearch 股関節動作支援用HAL 2019年4月17日 本研究では,開発した股関節動作支援用HALの動的動作における腰部負荷軽減を目的としています.解剖学の観点から原因を追求し,工学技術による腰痛の予防・緩和を目指しています. “HAL Equipped with Passive Mechanism”, Proc. of 2012 IEEE/SICE Internation...
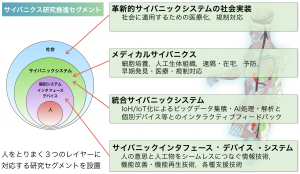
Research Cybernic InterfaceIntegrated SystemMedicalResearch Research 2019年4月17日 Cybernics(サイバニクス)とは サイバネティクス,メカトロニクス,情報科学を中枢とし,ロボット工学,脳神経科学,IT技術,人間工学,生理学,社会科学,心理学など,人・機械・情報系が融合複合した新領域です.社会が直面する課題は様々な分野の複合的な難しいものであるため,それらを解決するために非常に重要だと考えられま...
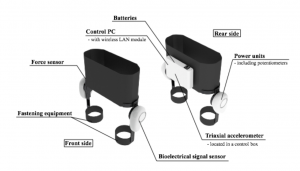
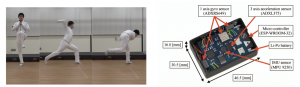
Research Integrated SystemResearch 人の技能情報抽出のためのIMUセンサモジュール開発 2019年4月17日 本研究では,熟練者が反復練習を通して習得した理想的な動作や体に負担の少ない動作の解析および定量的な動作教示を目的としています.異なる測定範囲を持つ2種類のセンサを組み合わせることで,低速動作から高速動作まで精度よく計測可能とする慣性式モーションキャプチャを開発し,理想的な動作や技能を他者に適切に教示するための動作情報取...
Research ResearchSocial Implementation HAL腰タイプ 2019年4月17日 本研究室の研究をもとに,以下3つのHAL腰タイプがCYBERDYNE株式会社にて製品化されました. 介護支援用 移乗介助のような介助動作において腰部にかかる負荷を低減することで、腰痛を引き起こすリスクを減らします。これまで通りの介護を楽に行うことができ、支えられる側だけでなく、支える側も支援します。 作業支援用 重量物...