
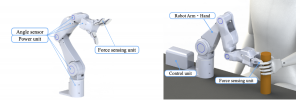
本研究では,片麻痺者の失われた上肢機能を代替可能なロボットアームを研究開発し,片麻痺者が上肢作業に抱える問題を解決することを目的としています.健常な手・腕の生体情報の活用や知能化・自動化によりロボットアームをサイバニック化することで,あたかも使用者の腕であるかのように人の意思に基づいて機能するサイバニックロボットアームの実現を目指しています.
[発表論文等]"接触面積や圧力分布に関わらず荷重と荷重中心位置の計測が可能なロボットフィンガー用触力覚センサの開発", 日本機械学会論文集, vol. 86, no. 889, p. 19-00272, 2020.
“Development of Cybernic Robot Arm to realize Support Action cooperated with Hemiplegic Person’s Arm”, Proceedings of 41th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp.1645-1650, July 2019.
“Basic research of upper limb work support system “My Cybernic Robot Arm” for hemiplegic persons”, Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO2017), pp.865-871, 2017.



