
運動制御とは?
ヒューマノイドロボットは多くの自由度を持っているので,その動作を決定するのが困難です。その問題を解決するため人の動作情報を参考にして,ヒューマノイドの動作を決定するのは有効と考えられます。しかし,人の動作情報を直接入力しただけでは,うまく制御できません。これは,人とヒューマノイドでは,慣性やリンク構造が異なるためです。本研究室では,Phase Sequenceと呼ばれる手法を用います。
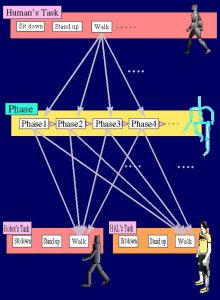
Phase Sequenceとは?
Phase Sequence とは,人の動作情報をヒューマノイドに適用する際に問題となる慣性などの系の違いを解消する手法の1つです。まず,人の動作情報をTaskと呼ばれる基本動作に分解します。このTaskとは,歩行,立ち上がり動作などのことを示します。次に,TaskをPhaseに分解します。Phaseは系の違いによらないためそれらを再合成することで系の異なるヒューマノイドにも適用できると考えられます。このPhaseとは人とヒューマノイドの系の違いによらない制御則のことを示します。
<参考文献>
・川村祐一郎, 野沢雅子, 今井晴基, 山海嘉之 ; ”人間の筋電位・動作パターンを利用した人間型ロボットモデルでの立ち上がり”,
第19回日本ロボット学会学術講演会論文集,2001
・野沢雅子, 川村祐一郎, 今井晴基, 山海嘉之 ; ”人の動作パターンを用いたヒューマノイドロボットのための動作タスク生成”, 第19回日本ロボット学会学術講演会論文集,2001
・今井晴基, 川村祐一郎, 野沢雅子, 山海嘉之 ; ”ヒューマノイドロボットに適用するための人の動作パターン獲得システム”, 第19回日本ロボット学会学術講演会論文集,2001



