

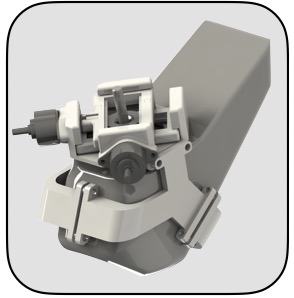
本研究では,筋力の低下した神経・筋疾患患者による電動車いすの操縦を実現するための支援を目的としています.電動車いすを改造することなく取り付け可能な操縦機構と,低下した筋力による微小な力を計測可能なセンサを研究・開発し,それらによる操縦支援システムの実現を目指しています.
[発表論文等]
“Basic Study on Cybernic Interface for Neuromuscular Intractable Rare Diseases Patients Operating an Electric Wheelchair”, proceedings of the International Symposium on System Integration (SII2019), pp. 254-258, 2019.



